موتور الکتریکی 200 کیلووات 3LC315L2-4، 1485 دور در دقیقه، راندمان فوق العاده بالا



موتورهای الکتریکی سری LC بازدهی را افزایش دادند

موتورهای الکتریکی سری LC از باکیفیت ترین الکتروموتورهای مورد استفاده در بازار صنعتی اروپا هستند.
الکتروموتورهای ال سی برای صنایع سنگین طراحی شده و در کلاس «عملکرد فرآیند سنگین» طبقه بندی می شوند .
آنها به ویژه برای صنعت اروپا و بازار اروپا ، به ویژه برای غرب اروپا (آلمان، بنلوکس، اتریش ..) توسعه یافته و تولید می شوند.
آنها با طراحی مدرن بصری ایجاد شده توسط فناوری های Hi-TECH که با سالها تجربه طراحی شده اند مشخص می شوند. منحنی های خاص موتور الکتریکی LC باعث کاهش دما و صدا در حین کار می شود.
طراحی موتورهای الکتریکی LC حداکثر برای عملکرد عالی با کمترین لرزش ممکن و ظرفیت اضافه بار بالا بهینه شده است.
موتورهای الکتریکی LC به گونه ای طراحی شده اند که می توان آنها را مستقیماً یا از طریق مبدل فرکانس روشن کرد. آنها برای مبدل های فرکانس VYBO Electric بهینه شده اند .

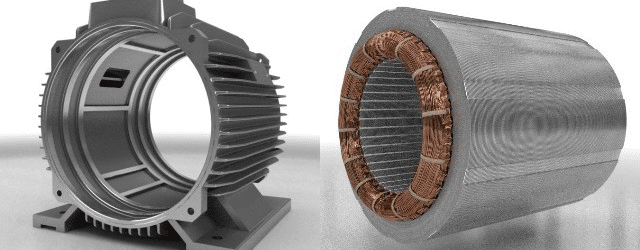
قاب سری LC
ساخت و ساز با طراحی عالی ساخته شده از چدن خاکستری. با سر و صدای کم، حداقل لرزش و خواص تهویه عالی. استاتور – ورق استاتور – برش ماشینی و پرس با دقت بالا. سیم پیچی – سیم میناکاری شده مسی با بالاترین کیفیت و خلوص. VPI (سیستم اشباع فشار خلاء) – اشباع خلاء. سیم پیچی ماشین.
موتورهای الکتریکی LC در حال حاضر دارای عناصر بالاتر از استاندارد به عنوان تجهیزات استاندارد هستند:
– روکش خنک کننده فولادی، ملخ خنک کننده (پوشش پلاستیکی به صورت استاندارد استفاده می شود)
– یاتاقان های تقویت شده با صفحه فولادی بسته
– گریس ویژه مقاوم در برابر درجه حرارت بالا در یاتاقان های تقویت شده
– جعبه ترمینال فلزی (پلاستیک به صورت استاندارد استفاده می شود)
– سپرهای بلبرینگ تقویت شده
الکتروموتورهای ال سی مجهز به حفاظت حرارتی PTC هستند.
در صورت درخواست، امکان افزودن هرگونه لوازم جانبی به طور مستقیم از ما وجود دارد.
– دماسنج PT100
– سنسورهای لرزش بنتلی نوادا (ساخت ایالات متحده)
– سنسورهای دو فلزی
– بخاری های ضد تراکم
الکتروموتورهای ال سی با حداکثر کیفیت و با دقت بسیار بالا تولید می شوند.
موجودی: در انبار
کارخانه و انبار بزرگ در یک مکان
قیمت در صورت درخواست
00421 907 937 187
mv@vyboelectric.eu
مدل
3LC-315L2-4
قدرت
200 کیلو وات
ولتاژ محاسبه شده
400/690 V
قاب
315 میلی متر
لهستانی ها
4
فرکانس
50 هرتز
سرعت
1485 دور در دقیقه
نوع قاب
چدن
ابعاد
315 لیتر 2
B3
315 لیتر 2
B5
315 لیتر 2
B35
دیتاشیت آنلاین
315 لیتر 2
3LC
گواهینامه های ISO

خدمات اورژانس 24h/7/365
انبار و کارخانه در اتحادیه اروپا (اسلواکی)
موتورهای الکتریکی مستقیماً از انبار (تا 6300 کیلووات)
طراحی سفارشی و سازگاری های فردی
تحویل سریع سریع
لوازم جانبی اختیاری
بهترین نسبت قیمت به کیفیت
طراحی جمع و جور، قاب مقاوم
ابعاد سفارشی
بازدهی بالا
حداقل لرزش و صدای کم
بلبرینگ با دوام با کیفیت بالا