مشخصات توان و دور الکتروموتور VEM سری KR در سرعت 3000 دور بر دقیقه (2 قطب)
| تیپ موتور | توان (کیلووات) | دور (rpm) | Cos Φ |
| الکتروموتور VEM تیپ K210 56 K2 | 0.09 | 2840 | 0.74 |
| الکتروموتور VEM تیپ K21R 56 G2 | 0.12 | 2830 | 0.77 |
| الکتروموتور VEM تیپ K21R 63 K2 | 0.18 | 2790 | 0.76 |
| الکتروموتور VEM تیپ K21R 63 G2 | 0.25 | 2800 | 0.72 |
| الکتروموتور VEM تیپ K21R 71 K2 | 0.37 | 2780 | 0.79 |
| الکتروموتور VEM تیپ K21R 71 G2 | 0.55 | 2775 | 0.81 |
| الکتروموتور VEM تیپ K21R 80 K2 | 0.75 | 2825 | 0.82 |
| الکتروموتور VEM تیپ K21R 80 G2 | 1.1 | 2835 | 0.81 |
| الکتروموتور VEM تیپ K21R 90 S2 | 1.5 | 2840 | 0.86 |
| الکتروموتور VEM تیپ K21R 90 L2 | 2.2 | 2850 | 0.85 |
| دینام VEM تیپ K21R 100 L2 | 3 | 2865 | 0.85 |
| دینام VEM تیپ K21R 112 M2 | 4 | 2900 | 0.81 |
| دینام VEM تیپ K21R 132 S2T | 5.5 | 2890 | 0.84 |
| دینام VEM تیپ K21R 132 SX2T | 7.5 | 2880 | 0.84 |
| دینام VEM تیپ K21R 132 S2 | 5.5 | 2870 | 0.86 |
| موتور VEM تیپ K21R 132 SX2 | 7.5 | 2890 | 0.85 |
| موتور VEM تیپ K21R 160 M2 | 11 | 2905 | 0.88 |
| موتور VEM تیپ K21R 160 MX2 | 15 | 2940 | 0.89 |
| موتور VEM تیپ K21R 160 L2 | 18.5 | 2925 | 0.90 |
| موتور VEM تیپ K21R 180 M2 | 22 | 2935 | 0.90 |
درباره الکتروموتور VEM
نوآورانه، آینده و مشتری مدار
VEM در آسیا در سال 2003 در سنگاپور تأسیس شد. یک تیم کوچک و هوشمند که فروش و خدمات پس از فروش جدید را برای کل مناطق APEC و اقیانوسیه هدایت می کند. موجودی در سنگاپور در عرض چند دقیقه در دسترس بودن موتور دریایی و ضد شعله را تضمین می کند.
VEM یک تولید کننده نوآورانه، فعال بین المللی و قابل اعتماد از سیستم های پیچیده فنی و راه حل های درایو، درایوهای سفارشی و قطعات منفرد است. ظرفیت خروجی از 0.06 کیلووات تا 60 مگاوات / 90 مگا ولت آمپر متغیر است. تداوم و قابلیت اطمینان، از جمله در آینده، این چیزی است که تولید و خدمات در VEM مخفف آن است. مهندسی و کیفیت محصولات با آرم VEM یکی از عوامل اصلی در بازار است.
VEM صنایع را تامین می کند
درایوهای الکتریکی برای هر تقاضا
حمل و نقل
مهندسی ماشین و کارخانه
کارخانه های فولاد و نورد
صنعت سمان و معدن
کشتی سازی
صنایع شیمیایی، نفت و گاز
مدیریت آب
انرژی های تجدیدپذیر
تکنولوژی نیروگاه
صنعت ماشین های هیبریدی
دلایل خوب برای خرید VEM
درایوهای الکتریکی برای هر تقاضا
- وابسته به کارخانه VEM آلمان و VEM چین
- ارائه طیف وسیعی از موتورهای COO آلمان و چین
- فروش، خدمات، قرارداد حمل و نقل، تبدیل، توصیه، پشتیبانی فنی به تمام 17 کشور در APAC (هدف نزدیکتر کردن تماس و پشتیبانی)
- قیمت گذاری به طور مستقیم توسط VEM Motors Asia Pte Ltd سنگاپور صرفه جویی قابل توجهی در هزینه ارائه می شود
- از کشورهای APAC/Oceania در دفتر مشتری، سایت برای ایجاد و حل مشکل برای مشتری بالقوه بازدید کنید
- بخشهای مختلف کسبوکار و کاربرد عمدتاً صنایع متوسط و سنگین را پوشش میدهد: شیمیایی، نفت و گاز، خمیر و کاغذ، کارخانههای فولاد و نورد، سیمان و معدن، انرژی، حملونقل، کشتیسازی، دریایی، تصفیه آب، نیروگاه و غیره.
- شرکت در نمایشگاه خارج از کشور برای ایجاد آگاهی از بازار و تماس های بالقوه آینده
- طیف متنوعی از سهام را در سنگاپور نگه دارید مانند: دریایی، صرفه جویی در انرژی، آهنربای دائمی همزمان، موتورهای ضد انفجار.
موتور الکتریکی
یک موتور الکتریکی برای تبدیل انرژی الکتریکی به انرژی مکانیکی استفاده می شود. بیایید یک مثال را مرور کنیم: میکسر در خانه شما چه کاری برای شما انجام می دهد؟ تیغه های دوار چیزها را برای شما له و مخلوط می کنند. و اگر کسی از شما بپرسد که چگونه کار می کند، چه می گویید؟ احتمالاً می گویید که روی برق کار می کند. خوب، این نادرست نیست. موتورها انرژی الکتریکی را به کار مکانیکی تبدیل می کنند. برعکس توسط ژنراتورهایی انجام می شود که کار مکانیکی را به انرژی الکتریکی تبدیل می کنند .
فهرست مطالب:
قسمت های مختلف موتور الکتریکی و عملکرد آنها
اصل کار یک موتور الکتریکی چیست؟
انواع موتور الکتریکی
موارد استفاده از موتور الکتریکی
سوالات متداول – سوالات متداول
قسمت های مختلف موتور الکتریکی و عملکرد آنها
یک موتور ساده دارای قطعات زیر است:
منبع تغذیه – بیشتر DC برای یک موتور ساده
آهنربای میدان – می تواند یک آهنربای دائمی یا یک آهنربای الکتریکی باشد
یک آرماتور یا روتور
کموتاتور
برس ها
محور
قطعات موتور الکتریکی
منبع تغذیه: یک موتور ساده معمولا منبع تغذیه DC دارد. برق آرمیچر موتور یا سیم پیچ های میدان را تامین می کند.
کموتاتور: رابط دوار سیم پیچ آرمیچر با مدار ثابت است.
آهنربای میدان: میدان مغناطیسی به تولید گشتاور بر روی سیم پیچ آرمیچر چرخان بر اساس قانون سمت چپ فلمینگ کمک می کند.
هسته آرمیچر: سیم پیچ آرمیچر را در جای خود نگه می دارد و پشتیبانی مکانیکی را فراهم می کند.
سیم پیچ آرمیچر: به کارکرد موتور کمک می کند.
برس ها: وسیله ای است که جریان را بین سیم های ثابت و قسمت های متحرک هدایت می کند که معمولاً محور چرخان است.
اصل کار یک موتور الکتریکی چیست؟
کار یک موتور الکتریکی بر این واقعیت استوار است که یک هادی حامل جریان یک میدان مغناطیسی در اطراف خود ایجاد می کند. برای درک بهتر وضعیت زیر را تصور کنید.
دو آهنربا میله ای بردارید و قطب ها را رو به روی هم نگه دارید و فضای کوچکی در بین آن ها قرار دهید. حالا طول کمی از یک سیم رسانا را بردارید و یک حلقه درست کنید. این حلقه را در بین فضای بین آهنرباها طوری نگه دارید که همچنان در حوزه نفوذ آهنرباها باشد. حالا برای آخرین بیت. انتهای حلقه را به پایانه های باتری وصل کنید.
هنگامی که الکتریسیته از مدار ساده شما عبور می کند، متوجه خواهید شد که حلقه شما “حرکت می کند”. پس چرا این اتفاق می افتد؟ میدان مغناطیسی آهنرباها با میدانی که به دلیل جریان الکتریکی در هادی ایجاد می شود تداخل ایجاد می کند. از آنجایی که حلقه به یک آهنربا تبدیل شده است، یک طرف آن به قطب شمال آهنربا و طرف دیگر به قطب جنوب جذب می شود. این باعث می شود که حلقه به طور مداوم بچرخد. این اصل کار موتور الکتریکی است.
انواع موتور الکتریکی
طبقه بندی اولیه موتور الکتریکی به شرح زیر است:
انواع موتور الکتریکی
موارد استفاده از موتور الکتریکی
موتورهای الکتریکی در کاربردهای مختلفی مورد استفاده قرار می گیرند. برخی از آنها به شرح زیر است.
مته
پمپ های آب
درایوهای دیسک سخت
ماشین های لباسشویی
تجهیزات صنعتی
شما می توانید انتظار داشته باشید که بازده یک موتور کارآمد حدود 70 تا 85 درصد باشد زیرا انرژی باقیمانده در تولید گرما و صداهای منتشر شده تلف می شود.
در ادامه با BYJU’S همراه باشید تا مقالات جالب دیگری از این دست را مشاهده کنید. همچنین، برای ویدیوهای تعاملی و جذاب مرتبط با فیزیک و کمک تحصیلی نامحدود، در «BYJU’S – The Learning App» ثبت نام کنید.
سوالات متداول – سوالات متداول
کدام وسیله کار مکانیکی را به انرژی الکتریکی تبدیل می کند؟
ژنراتور وسیله ای است که کار مکانیکی را به انرژی الکتریکی تبدیل می کند.
منظور از موتور الکتریکی چیست؟
یک موتور الکتریکی برای تبدیل انرژی الکتریکی به انرژی مکانیکی استفاده می شود.
عملکرد اصلی هسته آرمیچر چیست؟
هسته آرمیچر به نگه داشتن سیم پیچ آرمیچر در جای خود کمک می کند و پشتیبانی مکانیکی را فراهم می کند.
حالت درست یا غلط: موتورهای الکتریکی در هارد دیسک استفاده می شوند.
درست است، واقعی.
در مورد استفاده از موتور الکتریکی چند مثال بزنید.
موتور الکتریکی در موارد زیر استفاده می شود:
- مته
- پمپ های آب
- درایوهای دیسک سخت
- ماشین های لباسشویی
- تجهیزات صنعتی
تکنولوژی برق الکتروموتور VEM
جریان متناوب مفاهیم پایه مدارهای DC ماشین های الکتریکی موتورها
انواع موتورهای الکتریکی – طبقه بندی موتورهای AC، DC و ویژه
فناوری برق
طبقه بندی انواع موتورهای الکتریکی
موتور الکتریکی ماشینی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. برای تولید گشتاور برای بلند کردن بارها، جابجایی اجسام و کارهای مکانیکی مختلف استفاده می شود. در مقاله زیر به انواع موتورهای الکتریکی مانند AC، DC و انواع خاص موتور و غیره خواهیم پرداخت.
موتورهای الکتریکی عمدتاً به سه نوع طبقه بندی می شوند.
- موتورهای AC
- موتورهای DC
- موتورهای ویژه
Table of Contents
موتور AC
موتور الکتریکی AC انرژی الکتریکی AC (جریان متناوب) را به انرژی مکانیکی تبدیل می کند. این موتورهای الکتریکی با استفاده از جریان متناوب تک فاز یا سه فاز تغذیه می شوند. اصل کار موتور AC میدان مغناطیسی دوار (RMF) است که توسط سیم پیچ استاتور در هنگام عبور جریان متناوب از آن ایجاد می شود. روتور (دارای میدان مغناطیسی خاص خود) از RMF پیروی می کند و چرخش را شروع می کند.
موتورهای AC بیشتر به دو نوع طبقه بندی می شوند.
- موتور سنکرون
- موتور آسنکرون یا القایی
موتور سنکرون VEM
همانطور که از نام آن پیداست، چنین موتور AC دارای سرعت ثابتی به نام سرعت سنکرون است که فقط به فرکانس جریان تغذیه بستگی دارد. سرعت چنین موتورهای الکتریکی تنها با تغییر در فرکانس عرضه تغییر می کند و در بارهای مختلف ثابت می ماند. برای کاربرد سرعت ثابت و کنترل دقیق استفاده می شود.
یک موتور سنکرون همان طراحی استاتور موتور ناهمزمان را دارد و در صورت تامین جریان متناوب ورودی، میدان مغناطیسی چرخشی ایجاد می کند. در حالی که طراحی روتور ممکن است متفاوت باشد، یعنی از یک تحریک DC جداگانه برای تولید میدان مغناطیسی خود استفاده می کند.
- مطلب مرتبط: تفاوت موتور سنکرون و آسنکرون
موتور سنکرون DC
چنین موتور سنکرون نیاز به تحریک DC دارد. تحریک DC به این معنی است که روتور یک منبع DC جداگانه برای تولید شار مغناطیسی خود دارد. این شار با شار گردان استاتور واکنش می دهد و چرخش ایجاد می کند. از روتور سیم پیچی با مجموعه کموتاتور و برس ها برای تامین جریان به سیم پیچ های روتور استفاده کنید.
موتور سنکرون تک فاز
چنین موتور سنکرون با منبع AC تک فاز کار می کند. به طور دقیق، در واقع از دو فاز استفاده می کند، فاز دوم از فاز اول مشتق شده است. دلیل استفاده از دو فاز این است که یک فاز نمی تواند میدان مغناطیسی دوار ایجاد کند. چنین موتوری می تواند در هر جهت شروع به کار کند، یعنی جهت آن نامشخص است، به همین دلیل است که یک ترتیب راه اندازی اضافی برای جهت دادن به آن استفاده می شود.
سرعت چنین موتوری فقط به فرکانس عرضه بستگی دارد. آنها در ابزار ضبط، ساعت دیواری برقی استفاده می شوند.
موتور سنکرون سه فاز الکتروموتور VEM
این موتور سنکرون با منبع تغذیه سه فاز کار می کند. مزیت جریان متناوب سه فاز این است که یک میدان مغناطیسی دوار در استاتور ایجاد می کند در حالی که آرایش فازها جهت چرخش را تعیین می کند. این موتورها برای تعیین جهت خود به مکانیزم راه اندازی خاصی نیاز ندارند. با این حال، روتور هنوز به یک منبع DC اضافی برای تحریک نیاز دارد.
آنها در صنایع برای کاربردهایی استفاده می شوند که به سرعت ثابت در طیف وسیعی از بارها نیاز دارند و نیاز به موقعیت یابی دقیق در رباتیک دارند.
موتور سنکرون تحریک نشده
چنین موتور سنکرون که نیازی به تحریک DC ندارد، یعنی روتور برای تولید شار مغناطیسی به منبع DC جداگانه نیاز ندارد. آنها از روتورهای قفس سنجابی مانند موتورهای القایی استفاده می کنند.
موتور عدم تمایل الکتروموتور VEM
این یک موتور سنکرون تک فاز است که بر اساس اصل تولید گشتاور بر اساس رلوکتانس مغناطیسی کار می کند. دو نوع سیم پیچ استاتور وجود دارد یعنی سیم پیچ های اصلی و سیم پیچ های کمکی. سیم پیچ های کمکی برای راه اندازی موتور استفاده می شود. این روتور از نوع قفس سنجابی (بدون سیم پیچ) درست مانند موتورهای القایی ساخته شده از مواد فرومغناطیسی است.
موتور مانند یک موتور القایی تک فاز واقعی با استفاده از سیم پیچ کمکی راه اندازی می شود. هنگامی که موتور به سرعت نزدیک به سنکرون می رسد، سیم پیچ کمکی قطع می شود و روتور به دلیل ماهیت فرومغناطیسی روتور به طور همزمان قفل می شود و سعی می کند خود را در موقعیت کمتری در داخل میدان مغناطیسی دوار نگه دارد.
موتور هیسترزیس الکتروموتور VEM
این نوع موتور سنکرون بر اساس اصل از دست دادن پسماند یا مغناطیس باقی مانده در روتور کار می کند. چنین موتورهای الکتریکی با استفاده از منبع AC تک فاز و همچنین سه فاز کار می کنند. در یک موتور هیسترزیس تک فاز، یک سیمپیچ کمکی در کنار سیمپیچ اصلی مانند یک موتور رلوکتانس وجود دارد. روتور که به شکل استوانه است از مواد فرومغناطیسی با قابلیت احتباس مغناطیسی بالا یا تلفات پسماند مانند فولاد سخت شده ساخته شده است. روتور توسط یک شفت غیر مغناطیسی پشتیبانی می شود.
موتور به عنوان یک موتور القایی راه اندازی می شود. میدان مغناطیسی دوار استاتور باعث القای جریان گردابی در روتور می شود. جریان گردابی به دلیل خاصیت تلفات هیسترزیس بالای مواد روتور، گشتاور همراه با گشتاور هیسترزیس ایجاد می کند. با توجه به گشتاور جریان گردابی، موتور به عنوان یک موتور القایی عمل می کند.
هنگامی که موتور به سرعت نزدیک به سنکرون می رسد، میدان مغناطیسی دوار استاتور روتور را به صورت همزمان می کشد. ماهیت فرومغناطیسی روتور به دلیل RMF استاتور قطب های مغناطیسی مخالف ایجاد می کند و شروع به رفتار مانند یک آهنربای دائمی می کند. در چنین سرعتی، هیچ حرکت نسبی بین استاتور و روتور وجود ندارد. پس القایی وجود ندارد. بنابراین جریان گردابی یا گشتاور جریان گردابی وجود ندارد. گشتاور تولید شده توسط موتور در سرعت سنکرون ناشی از هیسترزیس است که به همین دلیل به آن موتور هیسترزیس می گویند.
مزیت اصلی موتور هیسترزیس این است که بدون جاروبک است و هیچ سیم پیچی در داخل روتور وجود ندارد. هیچ صدایی تولید نمی کند و بی صدا کار می کند.
معایب الکتروموتور VEM
- گشتاور بسیار کمی تولید می کند
- اگر گشتاور بار یک حد معین را افزایش دهد، سرعت آن کاهش می یابد و بنابراین دیگر به عنوان موتور سنکرون عمل نمی کند.
- کارایی کمتری دارد
- فقط در اندازه های کوچک موجود است.
در پخش کننده های ضبط که برای ویژگی های ضبط و پخش نیاز به سرعت ثابت دارند استفاده می شود. همچنین ساعت برقی به سرعت ثابت و غیره نیاز دارد.
موتور آسنکرون VEM
نوع موتور AC که هرگز با سرعت سنکرون کار نمی کند سرعت ناهمزمان نامیده می شود. سرعت روتور آن همیشه کمتر از سرعت سنکرون است. نیازی به تحریک روتور جداگانه ندارد.
موتورهای آسنکرون به طور خلاصه به دو نوع طبقه بندی می شوند.
- موتور القایی
- موتور کموتاتور
موتور القایی VEM
موتور القایی نوعی موتور ناهمزمان AC است که بر اساس اصل القای الکترومغناطیسی بین استاتور و روتور کار می کند. شار مغناطیسی گردان به دلیل القای الکترومغناطیسی جریانی را در روتور القا می کند که باعث تولید گشتاور در روتور می شود. پرکاربردترین موتور الکتریکی در صنایع می باشد.
عمدتاً بر اساس ساختار روتور آن به دو نوع تقسیم می شود.
موتور القایی قفس سنجابی
روتور چنین موتور القایی شبیه قفس سنجاب است. از میلههای مسی که در دو انتها با استفاده از یک حلقه رسانا برای ایجاد یک مدار حلقه بسته متصل شدهاند، ساخته شده است. اتصال الکتریکی به روتور وجود ندارد.
میدان مغناطیسی متغیر استاتور جریانی را در میله های روتور القا می کند. جریان القایی میدان مغناطیسی خود را در روتور ایجاد می کند که با میدان مغناطیسی گردان استاتور در تعامل است و سعی می کند با چرخش با آن در همان جهت آن را از بین ببرد.
دارای طراحی ساده، ارزان و قابل اعتمادتر است. از آنجایی که هیچ اتصال الکتریکی یا مونتاژ کموتاتور و برس وجود ندارد، نیاز به نگهداری کمتری دارد.
موتور القایی حلقه لغزشی یا روتور زخمی
حلقه لغزشی یا موتور القایی روتور زخمی نوع دیگری از موتورهای القایی است که در آن روتور از سیم پیچ هایی ساخته شده است که به حلقه های لغزشی متصل هستند. حلقه های لغزش برای اتصال سیم پیچ ها به مقاومت های خارجی برای کنترل جریان روتور و از این رو امکان کنترل ویژگی های سرعت/گشتاور استفاده می شود.
این اصل عملکردی مشابه موتور القایی قفس سنجابی دارد به جز اینکه جریان القایی در روتور را می توان با استفاده از مقاومت های خارجی کنترل کرد . مقاومت خارجی همچنین به افزایش مقاومت روتور در هنگام راه اندازی موتور کمک می کند تا جریان هجومی زیاد را کاهش دهد. همچنین گشتاور راه اندازی را برای بارهای اینرسی بالا به سمت چپ افزایش می دهد.
نقطه ضعف حلقه های لغزنده این است که به طور مداوم با برس هایی که به دلیل سایش و پارگی مکانیکی نیاز به نگهداری پرهزینه دارند، سر می خورد. ساخت و ساز پیچیده است و گران تر از موتور قفس سنجاب است.
- پست مرتبط: تفاوت بین موتور القایی تک فاز و سه فاز
موتور راه اندازی القایی استارت خازن
این یک موتور القایی تک فاز است که از یک خازن سری به همراه سیم پیچ کمکی خود برای تولید گشتاور اضافی در هنگام راه اندازی استفاده می کند. نام آن به وضوح نشان می دهد که خازن فقط برای راه اندازی موتور استفاده می شود و زمانی که موتور با استفاده از یک کلید گریز از مرکز به سرعت نزدیک به سنکرون برسد، آن را قطع می کند.

دارای دو سیم پیچ استاتور به نام سیم پیچ اصلی و سیم پیچ کمکی. سیم پیچ کمکی با استفاده از یک کلید گریز از مرکز به صورت سری به خازن متصل می شود. هنگامی که موتور شروع به کار می کند، جریان از هر دو سیم پیچ عبور می کند و گشتاور راه اندازی بالایی ایجاد می کند. هنگامی که موتور به سرعت کامل 70-80٪ رسید، سوئیچ گریز از مرکز منبع تغذیه سیم پیچ های کمکی را قطع کرد. موتور روی سیم پیچ اصلی کار خود را از سر می گیرد.
استارت خازن و موتور راه اندازی خازن
همچنین یک موتور القایی تک فاز است اما در عملکرد خود از دو خازن استفاده می کند. این دو خازن خازن شروع و خازن اجرا هستند. خازن استارت فقط برای راهاندازی خازن استفاده میشود تا گشتاور راهاندازی فوقالعادهای ارائه کند، در حالی که خازن کارکرد به طور مداوم برای عملکرد عادی برای راهاندازی موتور استفاده میشود. خازن راه انداز با استفاده از سوئیچ گریز از مرکز متصل و جدا می شود.

هنگامی که موتور شروع به کار می کند، هر دو خازن متصل می شوند و گشتاور راه اندازی بالایی را به روتور ارائه می دهند. به عنوان پیکاپ سرعت روتور، سوئیچ خازن راه اندازی را قطع می کند. چنین موتوری از هر دو سیم پیچ اصلی و کمکی به طور مداوم استفاده می کند، به همین دلیل است که عملکرد آن نرم تر از موتوری است که فقط روی سیم پیچ های اصلی مانند موتورهای خازن کار می کند.
مطلب مرتبط: نقش خازن در موتورهای فن سقفی چیست؟
موتور کموتاتور
این یک نوع موتور AC است که از مونتاژ کموتاتور و برس برای تامین برق روتور خود استفاده می کند. چنین موتورهای الکتریکی دارای روتور از نوع زخمی هستند.
موتور سری AC
همانطور که می دانیم، الکتروموتورها دو نوع سیم پیچ دارند یعنی سیم پیچ استاتور که به عنوان سیم پیچ میدانی و سیم پیچ روتور یا سیم پیچ آرمیچر شناخته می شود.
هنگامی که این هر دو سیم پیچ به صورت سری به هم متصل می شوند، به عنوان موتور سیم پیچ سری شناخته می شود. این موتور همچنین به دلیل قابلیت کارکرد با منبع AC و DC به عنوان موتور جهانی شناخته می شود.
سیم پیچ های میدان همان مقدار جریان سیم پیچ های روتور را حمل می کنند. برس هایی که جریان را از طریق کموتاتور به سیم پیچ آرمیچر می رسانند، سیم پیچ های آرمیچر را کوتاه می کنند و به عنوان یک ترانسفورماتور کوتاه عمل می کنند. برس ها قوس هایی ایجاد می کنند که با افزایش سرعت کاهش می یابد.
موتور AC Compensated Series
این یک شکل اصلاح شده از موتور سری AC است که در آن یک سیم پیچ اضافی به نام سیم پیچ جبران کننده به صورت سری به سیم پیچ های میدان و آرمیچر موجود اضافه می شود تا اثر ترانسفورماتور را که در موتورهای سری جبران نشده اتفاق می افتد، حذف کند.
سیمپیچ جبرانکننده در کنار سیمپیچهای میدان به استاتور اضافه میشود و همانطور که در شکل نشان داده شده است وصل میشود تا مشکل قوسبندی را برطرف یا کاهش دهد.
پست های مرتبط
- انواع سلف ها و کاربرد آنها
- فیوز و انواع فیوز – ساخت، بهره برداری و کاربردها
موتور دافعه
موتور دافعه نیز یک موتور تک فاز AC است که ورودی AC فقط به سیم پیچ های میدان یا استاتور اعمال می شود. سیم پیچ های آرمیچر به کموتاتور متصل می شوند. سیم پیچ های آرمیچر با استفاده از یک جفت برس کوتاه کوتاه می شوند. هیچ اتصال الکتریکی بین سیمپیچهای میدان و سیمپیچهای آرمیچر وجود ندارد. جریان روتور از طریق القایی تولید می شود.
برس ها به گونه ای پیکربندی شده اند که می توان آن را برای تغییر زاویه آن نسبت به محور خیالی استاتور حرکت داد. موتور را می توان با تغییر زاویه برس ها متوقف، راه اندازی و معکوس کرد و همچنین سرعت موتور را تغییر داد.
همانطور که روتور با استفاده از برس ها برای تشکیل یک حلقه کوتاه می شود، زمانی که جریان متناوب در سیم پیچ میدان جریان می یابد، جریان القا می شود. این جریان القایی که در سیم پیچ های روتور جریان دارد، میدان مغناطیسی خود را ایجاد می کند. جهت میدان مغناطیسی به زاویه برس بستگی دارد. این میدان مغناطیسی با میدان استاتور در تعامل است و روتور بر این اساس واکنش نشان می دهد. برای چرخش، برس ها کمی در 20 درجه در هر جهت چرخانده می شوند تا موتور در آن جهت بچرخند. قرار دادن برس ها در 90 درجه یا 180 درجه یا 0 درجه باعث توقف موتور می شود. تغییر زاویه دافعه بین میدان مغناطیسی استاتور و روتور را افزایش یا کاهش می دهد و سرعت روتور متفاوت است.
گشتاور راه اندازی را می توان با تغییر زاویه برس ها که حداکثر گشتاور راه اندازی را در 45 درجه ایجاد می کند، کنترل کرد. این موتور به دلیل تنظیم سرعت برتر برای کشش مورد استفاده قرار می گرفت اما توسط سایر موتورهای کششی جایگزین شده است.
دافعه-استارت موتور القایی-اجرای
موتور القایی دافعه یا موتور القایی راهاندازی دافعه نیز یک نسخه اصلاحشده از موتور القایی قفس سنجابی است که از ویژگی گشتاور راهاندازی بالا موتور دافعه استفاده میکند و معمولاً به عنوان موتور القایی قفس سنجابی کار میکند.
مکانیزم خاصی برای راه اندازی و راه اندازی موتور وجود دارد. در هنگام راه اندازی موتور، یک جفت برس کوتاه شده در زاویه ای مانند موتور دافعه به کموتاتور متصل می شود. هنگامی که موتور سرعت خود را افزایش می دهد، مکانیسم برس ها را بلند می کند و میله را با کوتاه کردن کموتاتور به یکدیگر متصل می کند تا یک روتور قفس سنجاب را تشکیل دهد. موتور به عنوان یک موتور القایی کار خود را از سر می گیرد.
مزیت استارت دافعه در مقایسه با هر موتور القایی دیگر، گشتاور راه اندازی ۵ تا ۶ برابر بالاتری را ارائه می دهد. برس ها همچنین طول عمر بیشتری دارند زیرا فقط برای راه اندازی موتور استفاده می شود. بنابراین، این الکتروموتورها عمر مکانیکی بالایی دارند و نیاز به نگهداری کمتری دارند.
موتور DC
موتور DC یکی دیگر از انواع اصلی موتورهای الکتریکی است که فقط با جریان مستقیم یا مستقیم کار می کند. هیچ فازی در جریان مستقیم وجود ندارد، به همین دلیل است که موتورهای الکتریکی DC تنها از 2 سیم برای راه اندازی استفاده می کنند. آنها اولین موتورهایی هستند که اختراع شدند. کنترل سرعت آن تنها با تغییر ولتاژ تغذیه آسان تر است. مکانیسم های ساده شروع، توقف، شتاب و معکوس را ارائه می دهد. هزینه نصب موتور DC بسیار ارزان است اما نیاز به تعمیر و نگهداری دارند که با افزایش اندازه و قدرت موتور، هزینه آن به طور قابل توجهی افزایش می یابد.
اصل کار موتورهای DC قانون دست چپ فلمینگ است. یک هادی حامل جریان در داخل یک میدان مغناطیسی نیروی رانش را متقابلاً عمود بر یکدیگر تجربه می کند.
موتورهای DC را می توان به طور خلاصه به انواع زیر طبقه بندی کرد
- موتور DC برس خورده
- موتور DC بدون جاروبک
- موتورهای DC بدون هسته یا بدون آهن
موتور DC برس خورده
همانطور که از نام آن پیداست، چنین موتورهای الکتریکی DC دارای برس و کموتاتور هستند. آنها برای اتصال یک مدار ثابت با یک مدار دوار استفاده می شوند. در چنین حالتی، سیم پیچ روتور موتور از طریق برس های رسانا انرژی می گیرد. عیب هر موتور برس خورده این است که به دلیل لغزش مداوم برس ها و جرقه های ایجاد شده بین آنها نیاز به تعمیر و نگهداری مکرر دارد. با این حال، آنها در طراحی بسیار ساده و گران هستند.
موتورهای الکتریکی DC برس خورده بیشتر به دسته بندی می شوند
- موتور با هیجان جداگانه
- موتور DC خود انگیخته
- موتور DC آهنربای دائمی
موتور DC با هیجان جداگانه
این نوع موتورهای DC دارای تحریک جداگانه هستند. برانگیختگی به انرژی بخشیدن به سیم پیچ های میدان اشاره دارد که به عنوان سیم پیچ های استاتور نیز شناخته می شود. هر دو سیم پیچ یعنی سیم پیچ میدان و سیم پیچ آرمیچر با یک منبع تغذیه جداگانه متصل می شوند.
در چنین پیکربندی، میتوانیم به طور مستقل میدان مغناطیسی را با افزایش تحریک DC بدون تغییر جریان آرمیچر تقویت کنیم. این نقطه متمایز اصلی است که جریان آرمیچر از طریق سیم پیچ میدان جریان نمی یابد.
موتور DC خود انگیخته
این نوع از موتورهای DC برس دار دارای سیم پیچ های میدانی خود هیجان انگیز هستند. سیم پیچ میدان به صورت الکتریکی با سیم پیچ های آرمیچر متصل می شود. یک منبع تغذیه واحد هر دو سیم پیچ را انرژی می دهد. بنابراین، نیازی به منبع تحریک جداگانه ندارد.
با این حال، سیم پیچ های میدان را می توان به صورت سری، موازی و تا حدی سری با سیم پیچ های آرمیچر متصل کرد. به همین دلیل است که موتورهای DC خود تحریک شده بیشتر به انواع زیر طبقه بندی می شوند.
- سریال زخم
- زخم شانت
- زخم مرکب
موتور DC سری Wound
در موتور DC سیم پیچ سری، سیم پیچ میدان به صورت سری به سیم پیچ های آرمیچر متصل می شود. بنابراین جریانی که از سیم پیچ های میدان می گذرد با جریانی که از سیم پیچ های آرمیچر می گذرد یکسان است.
سرعت چنین موتورهای الکتریکی با تغییر بار متصل به موتور تغییر می کند.
موتور DC زخم شنت
چنین موتورهای DC دارای سیم پیچ میدانی (همچنین به عنوان سیم پیچ میدان شنت) به موازات سیم پیچ آرمیچر متصل هستند. این اجازه می دهد تا یک ولتاژ پایانه کامل در سراسر سیم پیچ میدان وجود داشته باشد در حالی که هر دو سیم پیچ دارای ولتاژ یکسانی در سراسر آن هستند. در حالی که جریان عرضه شده به جریان میدان و جریان آرمیچر تقسیم می شود.
چنین موتورهای الکتریکی برای کاربرد سرعت ثابت آن استفاده می شود زیرا سرعت خود را در محدوده ای از بارهای متصل به آن حفظ می کند. سیم پیچ شنت به سیم پیچ هایی که به صورت موازی متصل شده اند اشاره دارد.
موتور DC زخم مرکب
موتور DC زخم مرکب از ویژگیهای موتور DC زخم سری و شنت استفاده میکند. هم ترکیب موازی و هم ترکیب سری سیم پیچ میدان و آرمیچر را با هم ترکیب می کند.
با توجه به ترکیب سیم پیچ های سری و موازی، موتورهای سیم پیچ مرکب را می توان بسته به ماهیت سیم پیچ ها به دو نوع زیر طبقه بندی کرد.
- ترکیب تجمعی
- مرکب دیفرانسیل
ترکیب تجمعی
هنگامی که میدان شنت و سیمپیچهای میدان سری در یک جهت شار ایجاد میکنند، شار میدان شنت به افزایش شار میدان اصلی سری کمک میکند، گفته میشود که موتور یک موتور پیچیده ترکیبی تجمعی است.
شار کل تولید شده در چنین حالتی همیشه بیشتر از شار اصلی است.
دیفرانسیل مرکب
هنگامی که میدان شنت و سیمپیچهای میدان سری، شار را در جهت مخالف ایجاد میکنند، شار اثرات یکدیگر را کاهش میدهد، گفته میشود که یک موتور DC ترکیبی متفاوت است.
کل شار تولید شده آنها همیشه کمتر از شار اصلی است. آنها هیچ کاربرد عملی در صنایع پیدا نمی کنند.
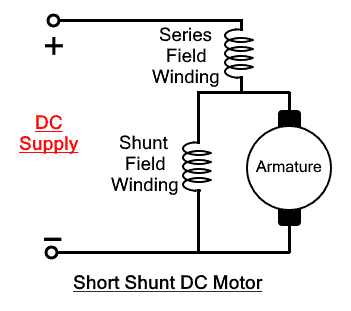
هر دو موتور ترکیبی بسته به ترتیب سیم پیچ ها می توانند شنت کوتاه و شنت بلند باشند. موتور DC شنت کوتاه و شنت بلند در زیر توضیح داده شده است.
موتور DC شنت کوتاه
اگر سیمپیچهای میدان شنت فقط موازی سیمپیچهای آرمیچر باشد و مطابق شکل زیر با سیمپیچهای میدانی بهصورت سری باشد، به یک موتور DC شنت کوتاه گفته میشود. به موتور زخم مرکب نیز معروف است.
موتور DC شنت بلند
اگر سیمپیچهای میدان شنت مذکور با سیمپیچ آرمیچر و سیمپیچ میدان موازی باشند، به یک موتور DC گفته میشود که یک موتور شنت بلند است.

- پست مرتبط: کنترل سرعت موتور DC – روش های کنترل ولتاژ، رئواستاتیک و شار
موتور DC مغناطیسی دائمی (PMDC)
موتور DC مغناطیس دائمی یا به اختصار موتور PMDC نیز نوع دیگری از موتورهای DC برس دار است. این آرمیچر معمولی مانند بقیه موتورهای الکتریکی DC برس خورده که در بالا توضیح داده شد، دارد. با این حال، سیم پیچ استاتور یا میدانی وجود ندارد، میدان مغناطیسی با استفاده از آهنربای دائمی که در استاتور قرار داده شده است، ایجاد می شود.
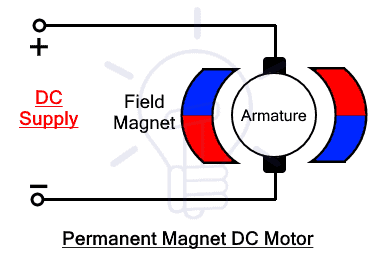
هنگامی که سیم پیچ های آرمیچر حامل جریان ورودی در داخل قطب های N و S آهنربا قرار می گیرد. میدان مغناطیسی با آن تعامل دارد و آرمیچر نیروی چرخشی را تجربه می کند.
آهنربای دائمی یک میدان مغناطیسی ثابت ایجاد می کند که در زمان ساخت طراحی شده است و پس از آن قابل تغییر نیست. با این حال، قدرت آهنربا با گذشت زمان کاهش می یابد. یک میدان تحریک اضافی در برخی طرح ها وجود دارد که به افزایش قدرت مغناطیسی آن در هنگام کاهش کمک می کند.
PMDC برای تولید شار میدان نیازی به تحریک میدان ندارد زیرا توسط آهنربای دائمی تولید می شود. این کارایی آن را افزایش می دهد زیرا هیچ نیروی اضافی برای تحریک مصرف نمی شود. عدم وجود سیم پیچ های میدان، اندازه کلی موتور را به شدت کاهش می دهد. بنابراین موتورهای PMDC دارای طراحی فشرده هستند. آنها همچنین بسیار ارزان تر و برای کاربردهای کم مصرف بهترین هستند.
مطلب مرتبط: قدرت، ولتاژ و معادله EMF یک موتور DC – فرمول ها
موتور DC بدون جاروبک
همانطور که از نام آن پیداست، موتور بدون جاروبک یا BLDC یکی دیگر از انواع اصلی موتورهای DC است که هیچ گونه مونتاژ برس و کموتاتور کربنی ندارد. این بدان معناست که برق ورودی به قسمت چرخان موتور نمی رسد بلکه به استاتور موتور که در این حالت از سیم پیچ های متعدد ساخته شده و روتور از آهنربای دائمی ساخته شده است.
دارای سیم پیچ های متعدد استاتور است که هر کدام در زاویه متفاوتی قرار گرفته اند تا در جهات مختلف شار ایجاد کنند. ورودی بین سیمپیچهای استاتور تغییر میکند تا میدان مغناطیسی ایجاد کند که میدان مغناطیسی روتور را فشار داده و میکشد و باعث میشود که در جهت خود بچرخد. سنسور اثر هال برای تشخیص موقعیت روتور و سوئیچ ورودی به سیم پیچ صحیح استاتور استفاده می شود.
از آنجایی که ورودی DC به استاتور نیاز به سوئیچ دارد، چنین موتورهای الکتریکی از کموتاسیون الکترونیکی به جای کموتاسیون مکانیکی با استفاده از وسایل سوئیچینگ مانند تریستور استفاده می کنند. این سوئیچ ها با استفاده از میکروکنترلر کنترل می شوند تا به طور دقیق ورودی را بین سیم پیچ های استاتور سوئیچ کنند. اساساً ورودی DC را به یک منبع تغذیه 3 فاز سوئیچ می کند که یک میدان مغناطیسی دوار صاف ایجاد می کند.
سرعت موتور بدون جاروبک بستگی به فرکانس برق AC عرضه شده توسط کنترلر دارد. به همین دلیل به آن موتور سنکرون نیز می گویند
کنترل کننده مورد استفاده برای موتور بدون براش پیچیده تر و بسیار گران است. بدون کنترلر خود کار نمی کند که کنترل دقیق سرعت و موقعیت روتور را نیز ارائه می دهد. اما هزینه کنترلر به مراتب بیشتر از خود موتور است.
از آنجایی که هیچ برس وجود ندارد، هیچ صدای الکتریکی یا الکترومغناطیسی و جرقه های ایجاد شده در کموتاسیون مکانیکی وجود ندارد. این به افزایش طول عمر موتور و همچنین راندمان موتور کمک می کند. انرژی تلف شده در برس ها به خروجی مکانیکی تبدیل می شود. و همچنین بدون تعمیر و نگهداری هستند.
پست مرتبط: تفاوت بین موتور براش و بدون برس
موتورهای DC بدون هسته یا بدون آهن الکتروموتور VEM
همانطور که از نام آن پیداست، چنین موتورهای DC فاقد هسته آهنی چند لایه هستند. سیم پیچ روتور به شکل اریب یا لانه زنبوری پیچیده می شود تا یک قفس توخالی خود نگهدار را تشکیل دهد که اغلب با استفاده از اپوکسی ساخته می شود. روتور ساخته شده از آهنربای دائمی در روتور توخالی قرار می گیرد.
طراحی بدون هسته، مشکلات و تلفات مرتبط با هسته های آهنی موتورهای سنتی را از بین می برد. به عنوان مثال، چنین موتورهای الکتریکی فاقد تلفات آهن هستند که بازده موتور را تا 90 درصد افزایش می دهد. این طراحی همچنین اندوکتانس سیم پیچ را کاهش می دهد که جرقه های ایجاد شده بین برس ها و کموتاتور را کاهش می دهد و در نتیجه طول عمر موتور را افزایش می دهد. همچنین جرم و اینرسی روتور را کاهش می دهد که همچنین باعث افزایش سرعت و سرعت موتور می شود.
موتورهای ویژه الکتروموتور VEM
انواع مختلفی از موتورهای الکتریکی ویژه وجود دارد که نسخه های اصلاح شده موتورهای دیگر هستند که برای اهداف خاص طراحی شده اند. برخی از این موتورهای الکتریکی در زیر آورده شده است.
سرو موتورز الکتروموتور VEM
سروو موتور نوع خاصی از موتور است که برای هل دادن/کشیدن یا بلند کردن یا چرخاندن یک جسم در یک زاویه خاص استفاده می شود. سروو موتور را می توان برای کار با منبع تغذیه AC و همچنین DC طراحی کرد. سروو موتورهایی که با منبع DC کار می کنند سروو موتور DC نامیده می شوند در حالی که به موتورهایی که با AC کار می کنند سروو موتور AC می گویند. این یک موتور ساده با یک کنترلر و چند دنده برای افزایش گشتاور آن است.
این موتورها بر حسب کیلوگرم بر سانتی متر (کیلوگرم بر سانتی متر) رتبه بندی می شوند. وزن زیادی را مشخص می کند که سروو می تواند در یک فاصله خاص بلند کند. به عنوان مثال، یک سرووی با درجه 3 کیلوگرم بر سانتی متر می تواند بار 3 کیلوگرمی را که در فاصله 1 سانتی متری از محور خود قرار دارد، بلند کند. ظرفیت وزنه برداری با افزایش مسافت کاهش می یابد.
سروو موتور دارای مجموعه دنده، کنترلر، سنسور و سیستم بازخورد است. مجموعه دنده برای کاهش سرعت و افزایش چشمگیر گشتاور آن استفاده می شود. این کنترلر برای مقایسه سیگنال ورودی (موقعیت مطلوب) و سیگنال سنسور (موقعیت واقعی سروو) که از طریق سیستم بازخورد به دست می آید، استفاده می شود. کنترلر این دو سیگنال را با هم مقایسه می کند و با چرخاندن شفت موتور خطای بین آنها را برطرف می کند.
سروو موتورها دارای سه سیم هستند. دو مورد از آنها برای تامین منبع تغذیه و سومی برای کنترل موقعیت سروو استفاده می شود. با ارائه یک سیگنال ضربانی از طریق یک میکروکنترلر با استفاده از PWM (مدولاسیون عرض پالس) کنترل می شود.
سروو می تواند 90 درجه در هر جهت بچرخد و در مجموع 180 درجه می چرخد. به طور خنثی در موقعیت وسط در 90 درجه قرار دارد. می تواند با تغییر عرض پالس بین 1 میلی ثانیه و 2 میلی ثانیه بچرخد که 1 میلی ثانیه مربوط به 0 درجه، 1.5 میلی ثانیه مربوط به 90 درجه و 2 میلی ثانیه مربوط به زاویه 180 درجه شفت است.
رانندگی مستقیم الکتروموتور VEM
موتور درایو مستقیم یا موتور گشتاور نیز یکی دیگر از انواع موتورهایی است که حتی در زمان خاموش شدن، گشتاور بالایی در سرعت پایین تولید می کند. محموله مستقیماً به روتور متصل می شود بنابراین استفاده از گیربکس، تسمه، کاهنده سرعت و غیره را حذف می کند. از آنجایی که ساییدگی و پارگی مکانیکی ندارد، قابل اعتماد است و طول عمر بالایی دارد. این واقعیت که قطعات مکانیکی کمتری دارد به این معنی است که نیاز به نگهداری کمتر و هزینه کم دارد.
موتورهای خطی الکتروموتور VEM
موتور خطی دارای یک استاتور و روتور بدون رول است که به جای نیروی چرخشی نیروی خطی ارائه می دهد. اگر هر موتوری را برش دهید و آن را صاف روی یک سطح قرار دهید، یک موتور خطی خواهید داشت.
سیم پیچ های آرمیچر به صورت خطی طراحی شده اند که جریان 3 فاز را برای تولید میدان مغناطیسی حمل می کند. میدان مغناطیسی نمی چرخد در عوض در یک خط مستقیم حرکت می کند. میدان مغناطیسی با میدان مغناطیسی ایجاد شده توسط آهنربای دائمی مسطح که در زیر آن قرار دارد، تعامل دارد. برهمکنش بین آنها یک نیروی خطی بر روی یکدیگر ایجاد می کند بنابراین آرمیچر به جلو یا عقب حرکت می کند.
این یک موتور AC با یک کنترل کننده مانند موتور سروو است. برق به قسمت اولیه موتور که دارای سیم پیچی است، می رسد. میدان مغناطیسی خود را تولید می کند که قطبیت آن به فاز منبع AC بستگی دارد. قسمت ثانویه موتور یک آهنربای دائمی است که میدان مغناطیسی آن با میدان مغناطیسی قطعه اصلی تعامل دارد و در نتیجه با ایجاد نیروی خطی آن را جذب و دفع می کند. مقدار جریان نیرو را تعیین می کند در حالی که سرعت تغییر جریان سرعت قطعه اولیه را تعیین می کند.
موتورهای خطی در رباتیک، تجهیزات پزشکی و اتوماسیون کارخانه و غیره استفاده می شوند.
- پست مرتبط: فرمول ها و معادلات موتورهای القایی و موتورهای القایی خطی
استپر موتور الکتروموتور VEM
موتور پله ای یا استپ موتور یک موتور DC بدون جاروبک است که چرخش کامل آن به تعدادی مرحله مساوی تقسیم می شود. چنین موتوری به جای چرخش مداوم در مراحل (درجات ثابت) می چرخد. چنین حرکات پله ای دقت بالایی را ارائه می دهد که در رباتیک مورد استفاده قرار می گیرد.
استپر موتور بر روی پالس کار می کند. هر پالس موتور را یک پله حرکت می دهد. دقت موتور به تعداد مراحل در هر دور بستگی دارد. اندازه مراحل در طول طراحی آن تعیین می شود. با این حال، سرعت موتور را می توان با استفاده از قطار پالس فرکانس متغیر کنترل کرد. کنترل کننده داخل سروو موتور با هر پالس یک پله روتور را به جلو یا عقب می برد.
برای موقعیت یابی دقیق و دقیق آن استفاده می شود. گشتاور کامل را در حالت سکون ارائه می دهد. به دلیل طراحی بدون برس نیاز به نگهداری کمتری دارد. بنابراین بسیار قابل اعتماد هستند و عمر طولانی دارند.
موتور پله ای به دلیل موقعیت یابی دقیق خود در ماشین های صنعتی مورد استفاده برای ساخت اتوماتیک محصولات، ماشین های مبتنی بر CNC استفاده می شود. همچنین کاربردهایی در ابزار و ماشین آلات پزشکی و همچنین دوربین های امنیتی پیدا کرد. Stepper به طور گسترده در ابزارهای الکترونیکی و سایر سیستم های الکترونیکی هوشمند استفاده می شود.
- مطلب مرتبط: فرمول ها و معادلات موتورهای سنکرون، پله ای و AC
موتور یونیورسال الکتروموتور VEM
موتور یونیورسال نوع خاصی از موتور است که می تواند با منبع تغذیه AC و DC کار کند. این یک موتور پیچ خورده سری است که در آن سیم پیچ های میدان به صورت سری به سیم پیچ های آرمیچر متصل می شوند. آنها حداکثر گشتاور راه اندازی را با سرعت عملیاتی بالا ارائه می دهند.
از آنجایی که سیم پیچ ها به صورت سری به هم متصل می شوند، جهت جریان از طریق هر دو سیم پیچ ثابت می ماند حتی اگر جهت جریان چندین بار در یک ثانیه معکوس شود. اگرچه ممکن است موتور در AC به دلیل واکنش سیم پیچ ها کندتر کار کند.