درایو/ اینورتر تک فاز Inverter فرکانس متغیر (VFD) چیست؟
درایو/اینورتر فرکانس متغیر (VFD) نوعی کنترل کننده موتور است که موتور الکتریکی را با تغییر فرکانس و ولتاژ منبع تغذیه آن به حرکت در می آورد. VFD همچنین دارای ظرفیت کنترل شیب بالا و پایین آمدن موتور به ترتیب در هنگام استارت یا توقف است.
حتی اگر اینورتر فرکانس و ولتاژ برق عرضه شده به موتور را کنترل می کند، اغلب به آن به عنوان کنترل سرعت اشاره می شود. نتیجه تنظیم سرعت موتور است.
دلایل زیادی وجود دارد که چرا تنظیم سرعت موتور خوب است.
مزایای کلیدی:
• صرفه جویی در انرژی و بهبود کارایی سیستم
• تبدیل توان در برنامه های هیبریداسیون
• سرعت درایو را با الزامات فرآیند مطابقت دهید
• گشتاور یا قدرت یک درایو را با الزامات فرآیند مطابقت دهید
• بهبود محیط کار
• سطوح سر و صدای کمتر، به عنوان مثال از فن ها و پمپ ها
- کاهش تنش مکانیکی روی ماشین ها برای افزایش طول عمر آنها
- برای جلوگیری از قیمت های پیک تقاضا و کاهش سایز موتور مورد نیاز، پیک مصرف را اصلاح کنید
اینورتر تک فاز Inverter علاوه بر این
امروزه اینورترها قابلیت های شبکه و تشخیص را برای کنترل بهتر عملکرد و افزایش بهره وری یکپارچه می کنند.
صرفه جویی در انرژی، کنترل هوشمند موتور و کاهش پیک جریان کشیده شده سه دلیل عالی برای انتخاب یک اینورتر فرکانس VFD به عنوان کنترل کننده در هر سیستم موتور محور است.
رایج ترین استفاده از اینورترهای فرکانس VFD برای کنترل پمپ ها، فن ها و کمپرسورها است. در سطح جهانی، این برنامه ها 75 درصد از کل درایوهای فعال را تشکیل می دهند.
سافت استارترها و کنتاکتورها انواع دیگری از کنترلرهای موتور هستند که کمتر پیچیده هستند. سافت استارتر یک دستگاه حالت جامد است و در هنگام راهاندازی یک موتور الکتریکی، یک شیب ملایم به سرعت کامل میدهد.
کنتاکتور سراسری یک نوع کنترل کننده موتور است که ولتاژ کامل خط را به یک موتور الکتریکی اعمال می کند.
درایو فرکانس متغیر


درایو فرکانس متغیر (VFD یا درایوهای فرکانس قابل تنظیم ، درایوهای سرعت قابل تنظیم )، درایوهای سرعت متغیر ، درایوهای AC، میکرو درایوها، درایوهای اینورتر یا درایوها ) نوعی AC درایو موتور (سیستم دارای موتور) است. که سرعت و گشتاور را با تغییر فرکانس برق ورودی کنترل می کند. بسته به توپولوژی مربوطه را کنترل می کند آن، تغییرات ولتاژ یا جریان . [1] [2] [3] [4] [5]
VFD ها در کاربردهای مختلف از وسایل کوچک تا کمپرسورهای بزرگ استفاده می شوند. [6] سیستمهایی که از VFD استفاده میکنند میتوانند کارآمدتر از سیستمهای هیدرولیک باشند ، مانند سیستمهای دارای پمپ و کنترل دمپر برای فنها. [7]
از دهه 1980، فناوری الکترونیک قدرت هزینه و اندازه VFD را کاهش داده و از طریق پیشرفت در دستگاه های سوئیچینگ نیمه هادی، توپولوژی های درایو، تکنیک های شبیه سازی و کنترل، و سخت افزار و نرم افزار کنترل، عملکرد را بهبود بخشیده است.
ولتاژ پایین و متوسط هستند VFD ها شامل توپولوژی های AC-AC و DC-AC با .
شرح و عملکرد سیستم

درایو فرکانس متغیر دستگاهی است که در یک سیستم درایو متشکل از سه زیر سیستم اصلی زیر استفاده می شود: موتور AC، مجموعه کنترل کننده درایو اصلی ، و رابط درایو/اپراتور. [2] : 210-211 [4]
موتور AC
موتور الکتریکی AC مورد استفاده در سیستم VFD معمولا یک سه فاز موتور القایی است . برخی از انواع موتورهای تک فاز یا موتورهای سنکرون در برخی شرایط می توانند سودمند باشند، اما به طور کلی موتورهای القایی سه فاز به عنوان مقرون به صرفه ترین ترجیح داده می شوند. موتورهایی که برای عملکرد با سرعت ثابت طراحی شده اند اغلب استفاده می شوند. تنش های ولتاژ بالا تحمیل شده بر موتورهای القایی که توسط VFD ها عرضه می شوند، مستلزم این است که چنین موتورهایی برای وظیفه تغذیه معین از اینورتر مطابق با الزاماتی مانند قسمت 31 استاندارد NEMA MG-1 طراحی شوند .
کنترلر
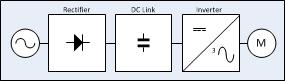
کنترلر VFD یک سیستم تبدیل الکترونیک قدرت حالت جامد است که از سه زیر سیستم مجزا تشکیل شده است: یکسو کننده مبدل پل ، لینک جریان مستقیم (DC) و یک اینورتر. درایوهای اینورتر منبع ولتاژ (VSI) (به بخش فرعی “توپولوژی های عمومی” در زیر مراجعه کنید) تا حد زیادی رایج ترین نوع درایوها هستند. اکثر درایوها درایوهای AC-AC هستند زیرا ورودی خط AC را به خروجی اینورتر AC تبدیل می کنند. با این حال، در برخی از برنامه ها مانند گذرگاه DC معمولی یا برنامه های کاربردی خورشیدی ، درایوها به عنوان درایوهای DC-AC پیکربندی می شوند. ابتدایی ترین مبدل یکسو کننده برای درایو VSI به عنوان یک سه فاز، شش پالس و تمام موج پل دیودی پیکربندی شده است . در درایو VSI، لینک DC از یک خازن خروجی DC مبدل را صاف می کند تشکیل شده است که موج و ورودی سفت به اینورتر ارائه می دهد. تبدیل می شود شبه سینوسی این ولتاژ DC فیلتر شده با استفاده از عناصر کلیدزنی فعال اینورتر به خروجی ولتاژ AC . درایوهای VSI ضریب توان بالاتر و اعوجاج هارمونیک کمتری را ارائه می دهند نسبت به کنترل شده فاز، منبع جریان درایوهای اینورتر (CSI) و اینورتر با تغییر بار (LCI) (به زیر بخش “توپولوژی های عمومی” در زیر مراجعه کنید). کنترل کننده درایو همچنین می تواند به عنوان یک مبدل فاز با ورودی مبدل تک فاز و خروجی اینورتر سه فاز پیکربندی شود. [9]
پیشرفتهای کنترلکننده از افزایش چشمگیر درجهبندی ولتاژ و جریان و فرکانس سوئیچینگ دستگاههای قدرت حالت جامد در شش دهه گذشته بهرهبرداری کرده است. در سال 1983 معرفی شد، ترانزیستور دوقطبی با گیت عایق (IGBT) که در دو دهه گذشته به عنوان یک دستگاه سوئیچینگ اینورتر بر VFD ها تسلط یافته است.
در کاربردهای گشتاور متغیر مناسب برای کنترل درایو ولت بر هرتز (V/Hz)، ویژگیهای موتور AC مستلزم آن است که مقدار ولتاژ خروجی اینورتر به موتور برای مطابقت با گشتاور بار مورد نیاز در یک رابطه خطی V/Hz تنظیم شود . . به عنوان مثال، برای موتورهای 460 ولت، 60 هرتز، این رابطه خطی V/Hz 460/60 = 7.67 V/Hz است. در حالی که در کاربردهای گسترده مناسب است، کنترل V/Hz در کاربردهای با کارایی بالا که شامل سرعت کم یا سخت، تنظیم سرعت دینامیکی، موقعیتیابی و نیازهای بار معکوس میشود، کمتر از حد مطلوب است. برخی از درایوهای کنترل V/Hz نیز میتوانند در حالت V/Hz درجه دوم کار کنند یا حتی میتوانند متناسب با مسیرهای ویژه چند نقطهای V/Hz برنامهریزی شوند.
دو پلت فرم کنترل درایو دیگر، کنترل برداری و کنترل گشتاور مستقیم (DTC)، مقدار ولتاژ موتور، زاویه از مرجع و فرکانس [16] را طوری تنظیم می کنند که شار مغناطیسی و گشتاور مکانیکی موتور را دقیقاً کنترل کند.
اگرچه پالس برداری فضا مدولاسیون عرض (SVPWM) به طور فزاینده ای محبوب می شود، [17] PWM سینوسی (SPWM) ساده ترین روشی است که برای تغییر ولتاژ (یا جریان) و فرکانس موتور درایوها استفاده می شود. دندانه دار با سیگنال سینوسی تعدیل کننده ساخته می شود با کنترل SPWM (نگاه کنید به شکل 1)، خروجی شبه سینوسی با پهنای پالس متغیر از تقاطع سیگنال حامل که در فرکانس کاری و همچنین ولتاژ (یا جریان) متغیر است. ).
کارکرد موتورهای بالاتر از سرعت پلاک نامی (سرعت پایه) امکان پذیر است، اما محدود به شرایطی است که نیازی به قدرت بیشتر از رتبه پلاک نام موتور ندارند. این گاهی اوقات “تضعیف میدان” نامیده می شود و برای موتورهای AC به معنای کارکرد با سرعت کمتر از V/Hz نامی و بالاتر از سرعت پلاک نامی است. موتورهای سنکرون مغناطیس دائم به دلیل اتصال شار مغناطیسی ثابت، محدوده سرعت تضعیف میدان کاملاً محدودی دارند . موتورهای سنکرون روتور پیچشی و موتورهای القایی محدوده سرعت بسیار بیشتری دارند. شود . برای مثال، یک موتور القایی 100 اسب بخار، 460 ولت، 60 هرتز، 1775 دور در دقیقه (4 قطبی) که با 460 ولت، 75 هرتز (6.134 ولت/هرتز) عرضه می شود، به 60/75 = 80 درصد گشتاور در 125 درصد محدود می سرعت (2218.75 دور در دقیقه) = 100٪ قدرت. [20] در سرعتهای بالاتر، گشتاور موتور القایی به دلیل کاهش گشتاور شکست [a] موتور باید بیشتر محدود شود. بنابراین، توان نامی معمولاً تنها تا 130 تا 150 درصد از سرعت نامی پلاک نام تولید می شود. موتورهای سنکرون Wound-Rotor را می توان با سرعت های بالاتری نیز راه اندازی کرد. در درایوهای آسیاب نورد، اغلب از 200 تا 300 درصد سرعت پایه استفاده می شود. قدرت مکانیکی روتور حداکثر سرعت موتور را محدود می کند.

یک تعبیه شده ریزپردازنده عملکرد کلی کنترلر VFD را کنترل می کند. اصلی برنامه نویسی ریزپردازنده به عنوان سیستم عامل غیرقابل دسترسی کاربر ارائه می شود . برنامه نویسی کاربر پارامترهای نمایشگر ، متغیر و بلوک عملکرد برای کنترل، محافظت و نظارت بر VFD، موتور و تجهیزات محرک ارائه شده است. [11] [21]
کنترل کننده اصلی درایو را می توان به گونه ای پیکربندی کرد که به طور انتخابی شامل اجزای قدرت اختیاری و لوازم جانبی به شرح زیر باشد:
- اتصال بالادست مبدل – قطع کننده مدار یا فیوزها ایزولاسیون ، کنتاکتور ، EMC فیلتر ، راکتور خط ، فیلتر غیرفعال
- متصل به لینک DC – ترمز خردکن ، مقاومت ترمز
- اتصال پایین دست اینورتر – راکتور خروجی، فیلتر موج سینوسی، فیلتر dV/dt.
رابط اپراتور
رابط اپراتور وسیله ای را برای اپراتور فراهم می کند تا موتور را روشن و خاموش کند و سرعت کار را تنظیم کند. VFD همچنین ممکن است توسط یک کنترل کننده منطقی قابل برنامه ریزی از طریق Modbus یا یک رابط مشابه دیگر کنترل شود. عملکردهای اضافی کنترل اپراتور ممکن است شامل معکوس کردن، و تغییر بین تنظیم سرعت دستی و کنترل خودکار از سیگنال کنترل فرآیند خارجی باشد . رابط اپراتور اغلب شامل یک نمایشگر الفبای عددی یا چراغ های نشانگر و متر برای ارائه اطلاعات در مورد عملکرد درایو است. صفحه کلید رابط اپراتور و واحد نمایش اغلب در جلوی کنترلر VFD همانطور که در عکس بالا نشان داده شده است، ارائه می شود. نمایشگر صفحه کلید اغلب می تواند به کابل متصل شود و در فاصله کوتاهی از کنترلر VFD نصب شود. اکثر آنها همچنین دارای پایانه های ورودی و خروجی (I/O) برای اتصال دکمه های فشاری، سوئیچ ها و سایر دستگاه های رابط اپراتور یا سیگنال های کنترلی هستند. یک ارتباطی سریال پورت نیز اغلب در دسترس است تا VFD را با استفاده از رایانه پیکربندی، تنظیم، نظارت و کنترل کند
کنترل سرعت
دو راه اصلی برای کنترل سرعت VFD وجود دارد. شبکه ای یا سخت سیمی شبکه شامل انتقال سرعت مورد نظر از طریق یک پروتکل ارتباطی مانند Modbus ، Modbus / TCP ، EtherNet/IP یا از طریق صفحه کلید با استفاده از رابط سریال نمایشگر است ، در حالی که سیمکشی سخت شامل یک وسیله ارتباطی الکتریکی خالص است. ابزارهای معمول ارتباط سیمی عبارتند از: 4-20mA ، 0-10VDC یا استفاده از منبع تغذیه داخلی 24VDC با پتانسیومتر . سرعت را می توان از راه دور و به صورت محلی نیز کنترل کرد. کنترل از راه دور به VFD دستور می دهد تا دستورات سرعت را از صفحه کلید نادیده بگیرد در حالی که کنترل محلی به VFD دستور می دهد کنترل خارجی را نادیده بگیرد و فقط از صفحه کلید پیروی کند.
برنامه نویسی VFD
بسته به مدل، پارامترهای عملکرد VFD را می توان از طریق: نرم افزار برنامه نویسی اختصاصی، صفحه کلید داخلی، صفحه کلید خارجی یا کارت SD برنامه ریزی کرد. VFD ها اغلب بسیاری از تغییرات برنامه نویسی را هنگام اجرا مسدود می کنند. پارامترهای معمولی که باید تنظیم شوند عبارتند از: اطلاعات پلاک موتور، منبع مرجع سرعت، منبع کنترل روشن/خاموش و کنترل ترمز. همچنین معمولاً VFD ها اطلاعات اشکال زدایی مانند کدهای خطا و وضعیت سیگنال های ورودی را ارائه می دهند.
راه اندازی و رفتار نرم افزار
اکثر VFD ها اجازه می دهند تا راه اندازی خودکار فعال شود. که خروجی را پس از یک چرخه برق، یا پس از رفع خطا، یا پس از بازیابی سیگنال توقف اضطراری، به فرکانس تعیین شده هدایت می کند (معمولاً توقف های اضطراری منطق کم فعال هستند). یکی از راه های رایج برای کنترل VFD، فعال کردن راه اندازی خودکار و قرار دادن L1، L2 و L3 در یک کنتاکتور است. بنابراین با روشن کردن کنتاکتور، درایو روشن می شود و خروجی آن به سرعت تعیین شده می رسد. بسته به پیچیدگی درایو، میتوان چندین رفتار راهاندازی خودکار ایجاد کرد، بهعنوان مثال، درایو بهطور خودکار با روشن شدن راهاندازی میشود، اما از پاک کردن توقف اضطراری تا زمان تنظیم مجدد، بهطور خودکار شروع به کار نمیکند.
عملیات درایو

با مراجعه به نمودار همراه، برنامههای درایو را میتوان به صورت تک ربعی، دو ربعی یا چهار ربعی دستهبندی کرد. چهار ربع نمودار به شرح زیر تعریف شده است:
- ربع I – رانندگی یا رانندگی، [29] به جلو ربع شتاب رو با سرعت و گشتاور مثبت
- Quadrant II – تولید یا ترمز، ترمز جلو – کاهش سرعت با سرعت مثبت و گشتاور منفی ربع
- ربع III – رانندگی یا رانندگی، ربع شتاب معکوس با سرعت و گشتاور منفی
- ربع IV – ایجاد یا ترمز، ربع ترمز معکوس-کاهش سرعت با سرعت منفی و گشتاور مثبت.
بیشتر کاربردها شامل بارهای تک ربعی است که در ربع I کار می کنند، مانند بارهای با گشتاور متغیر (مثلاً پمپ های گریز از مرکز یا فن ها) و با گشتاور ثابت خاص (مانند اکسترودر).
برخی از کاربردها شامل بارهای دو ربعی است که در ربع I و II کار می کنند که در آن سرعت مثبت است اما گشتاور قطبیت را تغییر می دهد مانند موردی که فن سریعتر از تلفات مکانیکی طبیعی کاهش می یابد. برخی منابع درایوهای دو ربعی را به عنوان بارهایی تعریف می کنند که در ربع I و III کار می کنند که در آن سرعت و گشتاور قطبیت یکسان (مثبت یا منفی) در هر دو جهت است.
برخی از کاربردهای با کارایی بالا شامل بارهای چهار ربعی (ربع I تا IV) هستند که در آن سرعت و گشتاور می تواند در هر جهتی مانند بالابرها، آسانسورها و نوار نقاله های تپه ای باشد. زمانی که ولتاژ اینورتر کوچکتر از ولتاژ برگشتی موتور باشد، بازسازی در گذرگاه پیوند DC درایو انجام می شود – EMF و ولتاژ اینورتر و EMF برگشتی قطبیت یکسانی دارند.
در راه اندازی یک موتور، VFD در ابتدا فرکانس و ولتاژ پایینی اعمال می کند، بنابراین از جریان هجومی زیاد مرتبط با راه اندازی مستقیم روی خط جلوگیری می کند . پس از شروع VFD، فرکانس و ولتاژ اعمال شده با نرخ کنترل شده افزایش می یابد یا برای تسریع بار افزایش می یابد. این روش راه اندازی معمولاً به موتور اجازه می دهد تا 150٪ از گشتاور نامی خود را توسعه دهد در حالی که VFD کمتر از 50٪ جریان نامی خود را از شبکه در محدوده سرعت پایین می گیرد. یک VFD را می توان برای تولید گشتاور ثابت 150 درصدی از حالت سکون تا سرعت کامل تنظیم کرد. [31] با این حال، خنک کننده موتور بدتر می شود و می تواند منجر به گرمای بیش از حد شود، زیرا سرعت کاهش می یابد، به طوری که کارکرد طولانی مدت در سرعت پایین با گشتاور قابل توجه معمولاً بدون تهویه موتور جداگانه فن امکان پذیر نیست.
با VFD، توالی توقف دقیقاً برعکس دنباله شروع است. فرکانس و ولتاژ اعمال شده به موتور با نرخ کنترل شده ای کاهش می یابد. هنگامی که فرکانس به صفر نزدیک می شود، موتور خاموش می شود. مقدار کمی گشتاور ترمز برای کمک به کاهش سرعت بار کمی سریعتر از توقف آن در صورتی که موتور به سادگی خاموش شود و اجازه حرکت داده شود، در دسترس است. گشتاور ترمز اضافی را می توان با افزودن یک مدار ترمز (مقاومتی که توسط ترانزیستور کنترل می شود) برای اتلاف انرژی ترمز بدست آورد. VFD با یکسوساز چهار ربعی (فعال جلویی)، قادر است بار را با اعمال گشتاور معکوس ترمز کند و انرژی را به خط AC تزریق کند.
مزایای اینورتر تک فاز Inverter
صرفه جویی در انرژی
بسیاری از برنامه های کاربردی بار موتور با سرعت ثابت که مستقیماً از برق خط AC تامین می شوند، زمانی که با سرعت متغیر توسط VFD کار می کنند، می توانند در مصرف انرژی صرفه جویی کنند. چنین صرفه جویی در هزینه انرژی به ویژه در کاربردهای فن سانتریفیوژ و پمپ با گشتاور متغیر، که در آن گشتاور و توان بار به ترتیب با مربع و مکعب سرعت متفاوت است، مشهود است. این تغییر برای کاهش نسبتاً کمی سرعت، کاهش توان زیادی را در مقایسه با عملکرد با سرعت ثابت به همراه دارد. به عنوان مثال، در سرعت 63 درصد یک بار موتور تنها 25 درصد از توان تمام سرعت خود را مصرف می کند. این کاهش مطابق با قوانین میل ترکیبی است که رابطه بین متغیرهای بار گریز از مرکز مختلف را تعریف می کند.
در ایالات متحده، تخمین زده میشود که 60 تا 65 درصد انرژی الکتریکی برای تأمین موتورها استفاده میشود که 75 درصد آن را بارهای فن، پمپ و کمپرسور با گشتاور متغیر تشکیل میدهند. هجده درصد از انرژی مورد استفاده در 40 میلیون موتور در ایالات متحده را می توان با فن آوری های بهبود انرژی کارآمد مانند VFD ها ذخیره کرد.
تنها حدود 3 درصد از کل پایه نصب شده موتورهای AC با درایوهای AC ارائه می شود. با این حال، تخمین زده می شود که فناوری درایو در 30 تا 40٪ از تمام موتورهای تازه نصب شده به کار گرفته شده است.
تفکیک مصرف انرژی جمعیت جهانی تاسیسات موتور AC به شرح جدول زیر است:
| کم اهمیت | هدف عمومی – اندازه متوسط | بزرگ | |
|---|---|---|---|
| قدرت | 10 وات – 750 وات | 0.75 کیلو وات – 375 کیلو وات | 375 کیلو وات – 10000 کیلو وات |
| فاز، ولتاژ | 1-ph.، <240 V | 3-ph، 200 ولت تا 1 کیلو ولت | 3-ph، 1 کیلو ولت تا 20 کیلو ولت |
| درصد کل انرژی موتور | 9% | 68% | 23% |
| کل سهام | 2 میلیارد | 230 میلیون | 0.6 میلیون |
کنترل عملکرد
درایوهای AC برای بهبود فرآیند و کیفیت در شتاب، جریان، نظارت، فشار، سرعت، دما، کشش و گشتاور کاربردهای صنعتی و تجاری استفاده میشوند.
بارهای سرعت ثابت موتور را در معرض گشتاور راه اندازی بالا و نوسانات جریانی تا هشت برابر جریان بار کامل قرار می دهند. درایوهای AC در عوض به تدریج موتور را تا سرعت کار بالا می برند تا استرس مکانیکی و الکتریکی را کاهش دهند، هزینه های تعمیر و نگهداری و تعمیرات را کاهش دهند و عمر موتور و تجهیزات رانده شده را افزایش دهند.
درایوهای سرعت متغیر همچنین می توانند یک موتور را در الگوهای تخصصی راه اندازی کنند تا استرس مکانیکی و الکتریکی را به حداقل برسانند. به عنوان مثال، یک الگوی منحنی S را می توان برای یک برنامه نوار نقاله برای کاهش سرعت و کنترل شتاب نرم تر اعمال کرد، که واکنش معکوس را که ممکن است در هنگام شتاب یا کاهش سرعت نوار نقاله رخ دهد، کاهش می دهد.
عوامل عملکردی که تمایل به استفاده از درایوهای DC نسبت به درایوهای AC دارند شامل مواردی مانند عملکرد مداوم در سرعت کم، عملکرد چهار ربعی با بازسازی، روالهای شتاب و کاهش مکرر، و نیاز به محافظت از موتور برای یک منطقه خطرناک است. [39] جدول زیر درایوهای AC و DC را با توجه به پارامترهای کلیدی خاصی مقایسه میکند: [40] [41] [42]
| نوع درایو | دی سی | AC VFD | AC VFD | AC VFD | AC VFD |
|---|---|---|---|---|---|
| پلت فرم کنترل | نوع برس DC | کنترل V/Hz | کنترل برداری | کنترل برداری | کنترل برداری |
| معیارهای کنترل | حلقه بسته | حلقه باز | حلقه باز | حلقه بسته | حلقه باز w. HFI^ |
| موتور | دی سی | من هستم | من هستم | من هستم | داخلی PM |
| تنظیم سرعت معمولی (%) | 0.01 | 1 | 0.5 | 0.01 | 0.02 |
| محدوده سرعت معمولی در گشتاور ثابت (%) | 0-100 | 10-100 | 3-100 | 0-100 | 0-100 |
| حداقل سرعت در 100٪ گشتاور (٪ از پایه) | سکون | 8% | 2% | سکون | سکون (200%) |
| عملکرد چند موتوره توصیه می شود | خیر | آره | خیر | خیر | خیر |
| حفاظت از خطا (فقط ذوب شده یا ذاتی درایو) | فقط ذوب شده | ذاتی | ذاتی | ذاتی | ذاتی |
| نگهداری | (برس) | کم | کم | کم | کم |
| دستگاه بازخورد | سرعت سنج یا رمزگذار | N/A | N/A | رمزگذار | N/A |
^ تزریق با فرکانس بالا
انواع VFD و رتبه بندی
توپولوژی های عمومی


درایوهای AC را می توان بر اساس توپولوژی های عمومی زیر طبقه بندی کرد:
- توپولوژی های درایو اینورتر منبع ولتاژ (VSI) (تصویر را ببینید): در یک درایو VSI، خروجی DC مبدل دیود پل، انرژی را در گذرگاه خازن ذخیره می کند تا ولتاژ ورودی سفت به اینورتر را تامین کند. اکثریت قریب به اتفاق درایوها از نوع VSI با خروجی ولتاژ PWM هستند. [d]
- توپولوژی های درایو اینورتر منبع جریان (CSI) (تصویر را ببینید): در یک درایو CSI، خروجی DC مبدل پل SCR انرژی را به صورت سری- اتصال سلف ذخیره می کند تا ورودی جریان سفت به اینورتر را تامین کند. درایوهای CSI می توانند با خروجی PWM یا شش مرحله ای شکل موج کار کنند.
- توپولوژیهای درایو اینورتر شش مرحلهای (تصویر را ببینید): [e] [45] اکنون درایوهای شش مرحلهای که تا حد زیادی منسوخ شدهاند، میتوانند از نوع VSI یا CSI باشند و به درایوهای اینورتر ولتاژ متغیر، مدولاسیون دامنه پالس (PAM) نیز گفته میشود. ) درایوها، [46] درایوهای موج مربعی یا چاپر DC درایوهای اینورتر . [47] در یک درایو شش مرحلهای، خروجی DC مبدل SCR-bridge از طریق گذرگاه خازن و اتصال راکتور سری هموار میشود تا از طریق جفت دارلینگتون یا اینورتر IGBT شبه سینوسی، ولتاژ یا جریان شش مرحلهای ورودی به یک ورودی تامین شود. موتور القایی [48]
- توپولوژیهای درایو اینورتر تبدیل بار (LCI) : در یک درایو LCI (یک مورد خاص CSI)، خروجی DC مبدل SCR-bridge انرژی را از طریق مدار سلف پیوند DC ذخیره میکند تا خروجی جریان شش مرحلهای شبه سینوسی سفت را در یک ثانیه تامین کند. اینورتر SCR-bridge و یک ماشین سنکرون بیش از حد برانگیخته. درایوهای موتور سنکرون مبتنی بر تریستور SCR با هزینه کم با تغذیه LCI اغلب در کاربردهای فن، پمپ و کمپرسور پرقدرت با کارایی پایین و فن و کمپرسور تا 100 مگاوات استفاده می شود. [49]
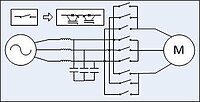
- توپولوژی های مبدل چرخه ای یا مبدل ماتریسی (MC) (تصویر را ببینید): مبدل های چرخه ای و MC ها مبدل های AC-AC هستند که هیچ پیوند DC میانی برای ذخیره انرژی ندارند. یک سیکلوکونورتر به عنوان منبع جریان سه فاز از طریق سه پل SCR متصل موازی با پیکربندی شش پالسی عمل می کند، هر فاز سیکلوکونورتر به طور انتخابی برای تبدیل ولتاژ AC فرکانس خط ثابت به ولتاژ متناوب در فرکانس بار متغیر عمل می کند. درایوهای MC مبتنی بر IGBT هستند.
- توپولوژی های سیستم بازیابی لغزش با تغذیه دوبل : یک با تغذیه دوگانه سیستم بازیابی لغزش ، توان لغزش اصلاح شده را به یک راکتور صاف کننده تغذیه می کند تا برق شبکه تغذیه AC را از طریق یک اینورتر تامین کند، سرعت موتور با تنظیم جریان DC کنترل می شود.
کنترل پلت فرم ها
اکثر درایوها از یک یا چند پلت فرم کنترل زیر استفاده می کنند: [43] [50]
- PWM V/Hz اسکالر کنترل
- PWM کنترل میدان گرا (FOC) یا کنترل برداری
- کنترل مستقیم گشتاور (DTC).
مشخصات گشتاور بار و قدرت
درایوهای فرکانس متغیر نیز بر اساس ویژگیهای گشتاور بار و قدرت زیر طبقهبندی میشوند:
- گشتاور متغیر، مانند کاربردهای فن گریز از مرکز، پمپ و دمنده
- گشتاور ثابت، مانند کاربردهای نقاله و پمپ جابجایی مثبت
- قدرت ثابت، مانند ماشین ابزار و کاربردهای کششی.
رتبهبندیهای توان موجود اینورتر تک فاز Inverter
VFD ها با درجه بندی ولتاژ و جریان موجود هستند که طیف گسترده ای از موتورهای AC تک فاز و چند فاز را پوشش می دهند. درایوهای ولتاژ پایین (LV) طوری طراحی شده اند که در ولتاژهای خروجی مساوی یا کمتر از 690 ولت کار کنند. در حالی که درایوهای LV با کاربرد موتور تا حد 5 یا 6 مگاوات در دسترس هستند، ملاحظات اقتصادی معمولاً به نفع خود هستند . درایوهای ولتاژ متوسط (MV) با توان بسیار پایین تر. توپولوژی های مختلف درایو MV (به جدول 2 مراجعه کنید) مطابق با رتبه بندی های ترکیب ولتاژ/جریان مورد استفاده در دستگاه های سوئیچینگ کنترل کننده های درایو مختلف پیکربندی شده اند ، به طوری که هر رتبه ولتاژ معینی بزرگتر یا مساوی یک با استاندارد اسمی زیر باشد. رتبه بندی ولتاژ موتور: به طور کلی یا 2 + 3 ⁄ 4 0.16 کیلو ولت (60 هرتز) یا 3 + 3 ⁄ 6 .6 کیلو ولت (50 هرتز)، با یک سازنده تریستور که برای سوئیچینگ تا 12 کیلو ولت رتبه بندی شده است. افزاینده در برخی از کاربردها یک ترانسفورماتور بین درایو LV و بار موتور MV قرار می گیرد. درایوهای MV معمولاً برای کاربردهای موتوری بیشتر از حدود 375 تا 750 کیلو وات (503 و 1006 اسب بخار) رتبه بندی می شوند. درایوهای MV از لحاظ تاریخی نیاز به تلاش بسیار بیشتری در طراحی اپلیکیشن نسبت به کاربردهای درایو LV داشته اند. [53] [54] رتبهبندی قدرت درایوهای MV میتواند به 100 مگاوات (130000 اسب بخار) برسد، طیفی از توپولوژیهای مختلف درایو برای رتبهبندی، عملکرد، کیفیت توان و الزامات قابلیت اطمینان متفاوت درگیر هستند.
درایوها توسط ماشین ها و توپولوژی های دقیق
در نهایت مفید است که VFD ها را بر اساس دو طبقه بندی زیر مرتبط کنیم:
- از نظر ماشین های AC مختلف همانطور که در جدول 1 در زیر نشان داده شده است
- از نظر توپولوژی های مختلف مبدل AC-AC که در جداول 2 و 3 در زیر نشان داده شده است.
ملاحظات کاربردی
هارمونیک های خط AC
تبصره توضیح:. [f]
در حالی که هارمونیک ها در خروجی PWM می توانند به راحتی توسط اندوکتانس فیلتر مربوط به فرکانس حامل فیلتر شوند تا جریان های سینوسی نزدیک به بار موتور را تامین کنند، [18] یکسو کننده پل دیود VFD ولتاژ خط AC را با اعمال فوق العاده به ولتاژ خروجی DC تبدیل می کند. پالس های جریان نیمه فاز غیر خطی در نتیجه اعوجاج جریان هارمونیک و در نتیجه اعوجاج ولتاژ ورودی خط AC ایجاد می کند. هنگامی که بارهای VFD در مقایسه با سیستم قدرت بزرگ و سفت موجود در شرکت برق نسبتاً کوچک است ، اثرات اعوجاج هارمونیک VFD شبکه AC اغلب می تواند در محدوده قابل قبول باشد. علاوه بر این، در شبکه های فشار ضعیف، هارمونیک های ناشی از تجهیزات تک فاز مانند کامپیوتر و تلویزیون تا حدی توسط هارمونیک های پل دیود سه فاز لغو می شوند زیرا هارمونیک های 5 و 7 آنها در فاز مقابل هستند. [65] با این حال، زمانی که نسبت VFD و سایر بارهای غیر خطی در مقایسه با بار کل یا بار غیر خطی در مقایسه با سختی منبع تغذیه AC، یا هر دو، به اندازه کافی بزرگ باشد، بار می تواند منفی باشد. تاثیر بر شکل موج برق AC موجود برای سایر مشتریان شرکت برق در همان شبکه.
هنگامی که ولتاژ شرکت برق به دلیل هارمونیک ها دچار اعوجاج می شود، تلفات در بارهای دیگر مانند موتورهای معمولی AC با سرعت ثابت افزایش می یابد. این وضعیت ممکن است منجر به گرمای بیش از حد و عمر مفید کمتر شود. همچنین ترانسفورماتورهای پست و خازن های جبرانی تحت تأثیر منفی قرار می گیرند. به طور خاص، خازن ها می توانند شرایط رزونانسی ایجاد کنند که می تواند به طور غیرقابل قبولی سطوح هارمونیک را بزرگ کند. برای محدود کردن اعوجاج ولتاژ، صاحبان بار VFD ممکن است نیاز به نصب تجهیزات فیلتر برای کاهش اعوجاج هارمونیک کمتر از حد مجاز داشته باشند. از طرف دیگر، ابزار ممکن است راه حلی را با نصب تجهیزات فیلترینگ خود در ایستگاه های فرعی که تحت تأثیر مقدار زیادی تجهیزات VFD مورد استفاده قرار می گیرند، اتخاذ کند. در تاسیسات پرقدرت، اعوجاج هارمونیک را می توان با تامین VFD های یکسو کننده پل چند پالس از ترانسفورماتورهای دارای سیم پیچ های چند فازی کاهش داد. [66]
همچنین میتوان یکسوکننده پل دیودی استاندارد را با یک پل دستگاه سوئیچینگ دو جهته IGBT جایگزین کرد که اینورتر استاندارد را منعکس میکند که از خروجی دستگاه سوئیچینگ IGBT به موتور استفاده میکند. نامیده میشوند چنین یکسو کنندههایی با عناوین مختلفی از جمله مبدل ورودی فعال (AIC)، یکسو کننده فعال ، واحد تامین IGBT (ISU)، قسمت جلویی فعال (AFE) یا عملکرد چهار ربعی . با کنترل PWM و یک راکتور ورودی مناسب، شکل موج جریان خط AC AFE میتواند تقریباً سینوسی باشد. AFE ذاتاً انرژی را در حالت چهار ربعی از سمت DC به شبکه AC بازسازی می کند. بنابراین، هیچ مقاومتی برای ترمز مورد نیاز نیست، و بازده درایو بهبود می یابد، اگر به طور مکرر به درایو برای ترمز موتور نیاز باشد.
دو تکنیک کاهش هارمونیک دیگر از فیلترهای غیرفعال یا فعال متصل به یک باس مشترک با حداقل یک بار شاخه VFD در گذرگاه استفاده می کنند. فیلترهای غیرفعال شامل طراحی یک یا چند = تله فیلتر LC کم گذر هستند که هر تله بر اساس نیاز به یک فرکانس هارمونیک تنظیم می شود (5th, 7, 11, 13, . . . kq+/-1, جایی که k=عدد صحیح, q شماره پالس مبدل). [67]
اعمال محدودیت های اعوجاج هارمونیک بر اساس استانداردهای IEC یا IEEE برای شرکت های برق یا مشتریان آنها بسیار رایج است . به عنوان مثال، استاندارد IEEE 519 در نقطه اتصال مشتری، حداکثر هارمونیک ولتاژ فرکانس فردی را بیش از 3 درصد از ولتاژ اصلی محدود می کند و اعوجاج هارمونیک کل ولتاژ (THD) را بیش از 5 درصد برای یک هارمونیک محدود می کند. سیستم منبع تغذیه عمومی AC [68]
تعویض فرکانس تاشو
یک درایو از تنظیم فرکانس سوئیچینگ پیش فرض 4 کیلوهرتز استفاده می کند. کاهش فرکانس سوئیچینگ درایو (فرکانس حامل) گرمای تولید شده توسط IGBT ها را کاهش می دهد . [69]
برای تعیین فواصل سوئیچینگ PWM از فرکانس حامل حداقل ده برابر فرکانس خروجی مورد نظر استفاده می شود. فرکانس حامل در محدوده 2000 تا 16000 هرتز برای VFDهای LV [ولتاژ پایین، کمتر از 600 ولت AC] رایج است. فرکانس حامل بالاتر تقریب موج سینوسی بهتری ایجاد میکند، اما تلفات سوئیچینگ بالاتری را در IGBT ایجاد میکند و بازده کلی تبدیل توان را کاهش میدهد. [70]
صاف کردن نویز
برخی از درایوها دارای ویژگی صاف کردن نویز هستند که می توان آن را روشن کرد تا تغییرات تصادفی در فرکانس سوئیچینگ ایجاد شود. این نویز صوتی را در طیف وسیعی از فرکانس ها توزیع می کند تا شدت نویز اوج کاهش یابد.
جلوه های طولانی مدت
ولتاژ خروجی پالس فرکانس حامل یک PWM VFD باعث افزایش زمان های سریع در این پالس ها می شود که اثرات خط انتقال آن باید در نظر گرفته شود. خط انتقال از آنجایی که امپدانس کابل و موتور متفاوت است، پالسها تمایل دارند از پایانههای موتور به داخل کابل منعکس شوند. انعکاس های حاصل می توانند ولتاژهایی برابر با دو برابر ولتاژ باس DC یا تا 3.1 برابر ولتاژ نامی خط برای کابل کشی طولانی ایجاد کنند و فشار زیادی را بر سیم پیچ کابل و موتور وارد کنند و در نهایت شکست عایق را وارد کنند. استانداردهای عایق برای موتورهای سه فاز با ولتاژ 230 ولت یا کمتر به اندازه کافی در برابر چنین ولتاژهای طولانی مدت محافظت می کند. در سیستمها و اینورترهای 460 ولت یا 575 ولت با IGBTهای نسل سوم با زمان افزایش 0.1 میکروثانیه، حداکثر فاصله کابل بین VFD و موتور حدود 50 متر یا 150 فوت است. برای درایوهای در حال ظهور SiC MOSFET، اضافه ولتاژهای قابل توجهی در طول کابل های کوتاه تا 3 متر مشاهده شده است. [71] راهحلهایی برای اضافه ولتاژهای ناشی از طولهای بلند سرب شامل به حداقل رساندن طول کابل، کاهش فرکانس حامل، نصب فیلترهای dV/dt، استفاده از موتورهای دارای رتبهبندی اینورتر (که دارای ولتاژ 600 ولت برای مقاومت در برابر قطارهای پالسی با زمان خیز کمتر یا مساوی هستند. تا 0.1 میکروثانیه، با قدر پیک 1600 ولت)، و نصب فیلترهای موج سینوسی کم گذر LCR. [72] [73] [74] [75] انتخاب فرکانس بهینه حامل PWM برای درایوهای AC شامل متعادل کردن نویز، گرما، تنش عایق موتور، آسیب جریان یاتاقان موتور ناشی از ولتاژ حالت معمول، عملکرد روان موتور، و عوامل دیگر است. تضعیف هارمونیک بیشتر را می توان با استفاده از فیلتر موج سینوسی کم گذر LCR یا فیلتر dV/dt بدست آورد. [76] [77] [78] [79]
جریان اینورتر تک فاز Inverter موتور
فرکانس های حامل بالاتر از 5 کیلوهرتز ممکن است باعث آسیب یاتاقان شوند مگر اینکه اقدامات حفاظتی انجام شود. [80]
درایوهای PWM ذاتاً با ولتاژها و جریانهای معمولی با فرکانس بالا مرتبط هستند که ممکن است باعث ایجاد مشکل در یاتاقان موتور شود. [81] هنگامی که این ولتاژهای فرکانس بالا از طریق یک یاتاقان مسیری به زمین پیدا می کنند، جرقه انتقال فلز یا ماشین تخلیه الکتریکی (EDM) بین توپ یاتاقان و مسابقه یاتاقان رخ می دهد. با گذشت زمان، جرقه بر اساس EDM باعث فرسایش در نژاد بلبرینگ می شود که می تواند به عنوان یک الگوی فلوت دیده شود. در موتورهای بزرگ، ظرفیت سرگردان سیمپیچها مسیرهایی را برای جریانهای فرکانس بالا فراهم میکند که از انتهای شفت موتور عبور میکنند و منجر به یک نوع جریان یاتاقان در گردش میشوند. ضعیف زمین استاتورهای موتور می تواند منجر به جریان های یاتاقان شفت به زمین شود. موتورهای کوچک با تجهیزات اتصال به زمین ضعیف، مستعد جریان های یاتاقان با فرکانس بالا هستند. [82]
جلوگیری از آسیب جریان یاتاقان با فرکانس بالا از سه روش استفاده می کند: کابل کشی و روش های اتصال به زمین، قطع جریان های یاتاقان، و فیلتر یا میرایی جریان های معمولی برای مثال از طریق هسته های مغناطیسی نرم، به اصطلاح جاذب های القایی. روشهای خوب کابلکشی و اتصال به زمین میتواند شامل استفاده از کابل برق محافظ دارای هندسه متقارن برای تامین موتور، نصب برسهای اتصال به زمین و گریس یاتاقان رسانا باشد. جریان یاتاقان را می توان با نصب یاتاقان های عایق بندی شده و موتورهای القایی محافظ الکترواستاتیک طراحی شده قطع کرد. فیلتر کردن و میرایی یاتاقان های فرکانس بالا را می توان با قرار دادن هسته های مغناطیسی نرم در سه فاز انجام داد که امپدانس فرکانس بالایی را در برابر حالت معمول یا جریان های یاتاقان موتور ایجاد می کند. روش دیگر استفاده از درایوهای اینورتر دو سطحی استاندارد، با استفاده از درایوهای اینورتر سه سطحی یا مبدل های ماتریسی است. [82] [83]
از آنجایی که نوک جریان با فرکانس بالا کابلهای موتور تغذیهشده با اینورتر میتواند با کابلهای دیگر در تاسیسات تداخل ایجاد کند، چنین کابلهای موتور تغذیهشده با اینورتر نه تنها باید از طراحی شیلددار و متقارن هندسی برخوردار باشند، بلکه باید حداقل 50 سانتیمتر از کابلهای سیگنال فاصله داشته باشند. .
ترمز دینامیک
گشتاور تولید شده توسط درایو باعث می شود که موتور القایی با سرعت سنکرون بدون لغزش کار کند. اگر بار موتور را سریعتر از سرعت سنکرون به حرکت درآورد، موتور به عنوان یک ژنراتور عمل می کند و نیروی مکانیکی را به نیروی الکتریکی تبدیل می کند. این توان به عنصر پیوند DC درایو (خازن یا راکتور) باز می گردد. یک سوئیچ برق الکترونیکی متصل به DC یا قطع کننده DC ترمز، اتلاف این نیرو را به عنوان گرما در مجموعه ای از مقاومت ها کنترل می کند. ممکن است از فن های خنک کننده برای جلوگیری از گرم شدن بیش از حد مقاومت استفاده شود. [28]
ترمز دینامیکی انرژی ترمز را با تبدیل آن به گرما هدر می دهد. در مقابل، درایوهای احیا کننده انرژی ترمز را با تزریق این انرژی به خط AC بازیابی می کنند. با این حال، هزینه سرمایه درایوهای احیا کننده نسبتاً بالا است. [85]
درایوهای احیا کننده


درایوهای AC احیاکننده این ظرفیت را دارند که انرژی ترمز باری را که سریعتر از سرعت تعیین شده موتور حرکت می کند (بار تعمیرات اساسی ) بازیابی کرده و آن را به سیستم قدرت برگردانند.
درایوهای Cycloconverter، Scherbius، Matrix، CSI و LCI ذاتا اجازه بازگشت انرژی از بار به خط را می دهند، در حالی که اینورترهای منبع ولتاژ به یک مبدل اضافی برای بازگشت انرژی به منبع نیاز دارند. [87] [88]
بازسازی در VFD ها فقط در جایی مفید است که ارزش انرژی بازیافتی در مقایسه با هزینه اضافی یک سیستم احیا کننده زیاد باشد، و اگر سیستم نیاز به ترمز و استارت مکرر داشته باشد. VFD های احیا کننده به طور گسترده در مواردی که کنترل سرعت بارهای تعمیرات اساسی مورد نیاز است استفاده می شود.
چند نمونه:
- درایوهای تسمه نقاله برای تولید، که هر چند دقیقه یکبار متوقف می شوند. در حین توقف، قطعات به درستی مونتاژ می شوند. پس از انجام این کار، کمربند حرکت می کند.
- جرثقیل که در آن موتور بالابر مکررا متوقف و معکوس می شود و برای کاهش بار در هنگام پایین آمدن به ترمز نیاز است.
- خودروهای برقی پلاگین و هیبریدی از همه نوع (به تصویر و Hybrid Synergy Drive مراجعه کنید ).